
Agentes de IA treinam robôs para instalar GPUs e cortar abraçadeiras
Por Mag-Info Tech editorial · 2026-06-18
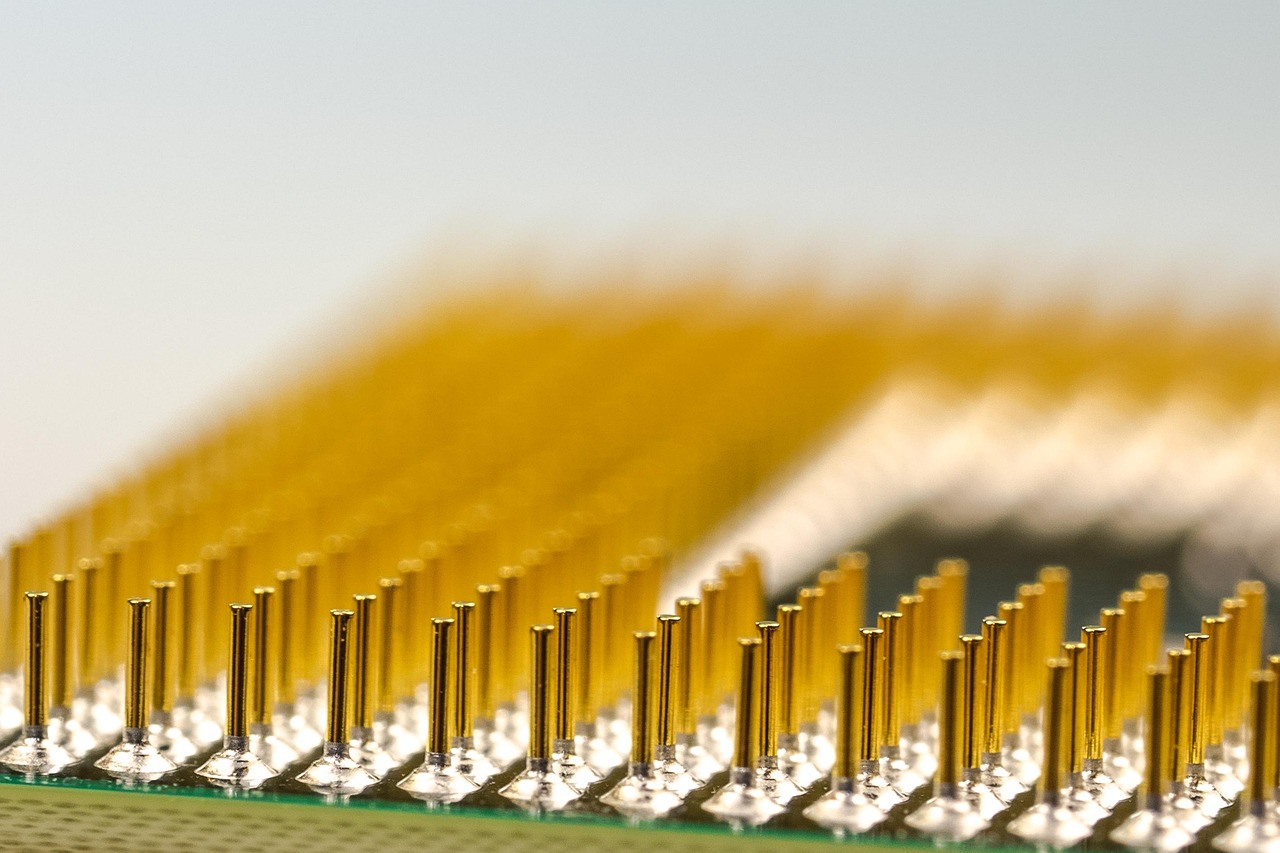
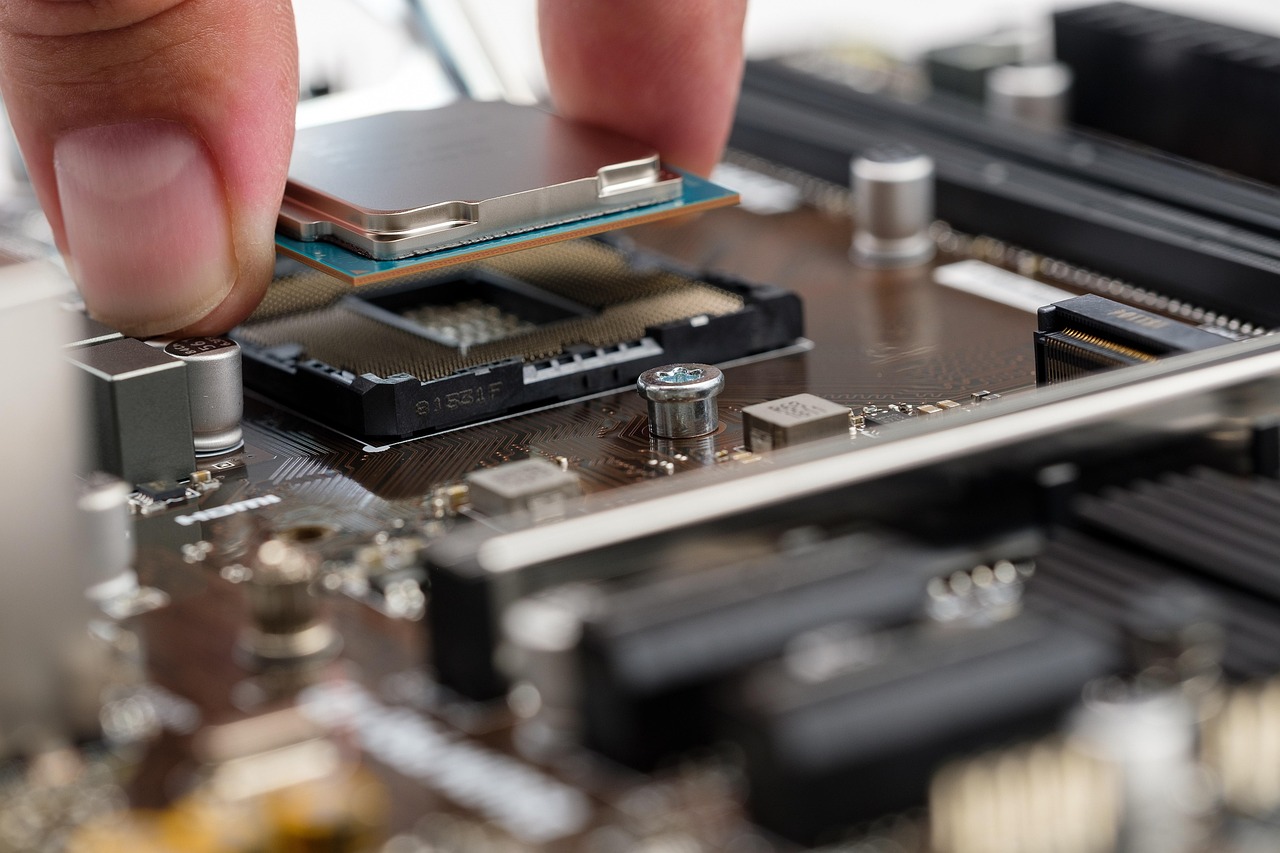
A capacidade de um robô executar tarefas precisas como inserir uma GPU em um slot estreito de uma placa-mãe ou cortar abraçadeiras plásticas depende não apenas de sua mecânica, mas também de um sistema que consiga projetar, supervisionar e refinar seu próprio treinamento. Pesquisadores do laboratório Nvidia GEAR, em colaboração com a Carnegie Mellon University e a Universidade da Califórnia em Berkeley, desenvolveram um arcabouço chamado ENPIRE que permite que equipes de agentes de IA atuem como instrutores autônomos de robôs. Em vez de programadores humanos definirem passo a passo cada movimento, os agentes de IA planejam experimentos, executam simulações, ajustam parâmetros e iteram até que o robô consiga realizar a tarefa com sucesso.
O laboratório Nvidia GEAR, dedicado à pesquisa de agentes embarcados generalistas, anunciou que parte de seu ambiente agora opera de forma contínua e autônoma durante a noite. Segundo Jim Fan, diretor de IA da Nvidia, os relatórios gerados pela manhã mostram que os agentes de IA conseguiram ensinar robôs a cortar abraçadeiras plásticas e a inserir GPUs em slots finos de placas-mãe com alta precisão. Fan destacou que o objetivo não é apenas automatizar tarefas de laboratório, mas criar um ecossistema em que robôs possam aprender novas habilidades sem intervenção humana constante. A equipe também mencionou que disponibilizará o código-fonte do ENPIRE para que qualquer pessoa possa replicar o experimento em seu próprio laboratório, transformando o conceito de “laboratório autônomo” em uma possibilidade doméstica ou corporativa.
Como o ENPIRE transforma robôs em aprendizes autodidatas
O arcabouço ENPIRE funciona como um ambiente de execução para agentes de IA, permitindo que eles interajam com ferramentas, gerenciem memória, apliquem restrições e recebam feedback em tempo real. O sistema é composto por quatro módulos principais: planejamento, execução, monitoramento e adaptação. O módulo de planejamento decompõe a tarefa em subproblemas, como identificar a posição correta da GPU ou a pressão ideal para cortar a abraçadeira. O módulo de execução traduz esses planos em comandos para os braços robóticos, enquanto o monitoramento coleta dados de sensores e câmeras para avaliar o desempenho. Por fim, o módulo de adaptação ajusta os parâmetros com base nos resultados, permitindo que o robô refine sua técnica em iterações subsequentes.
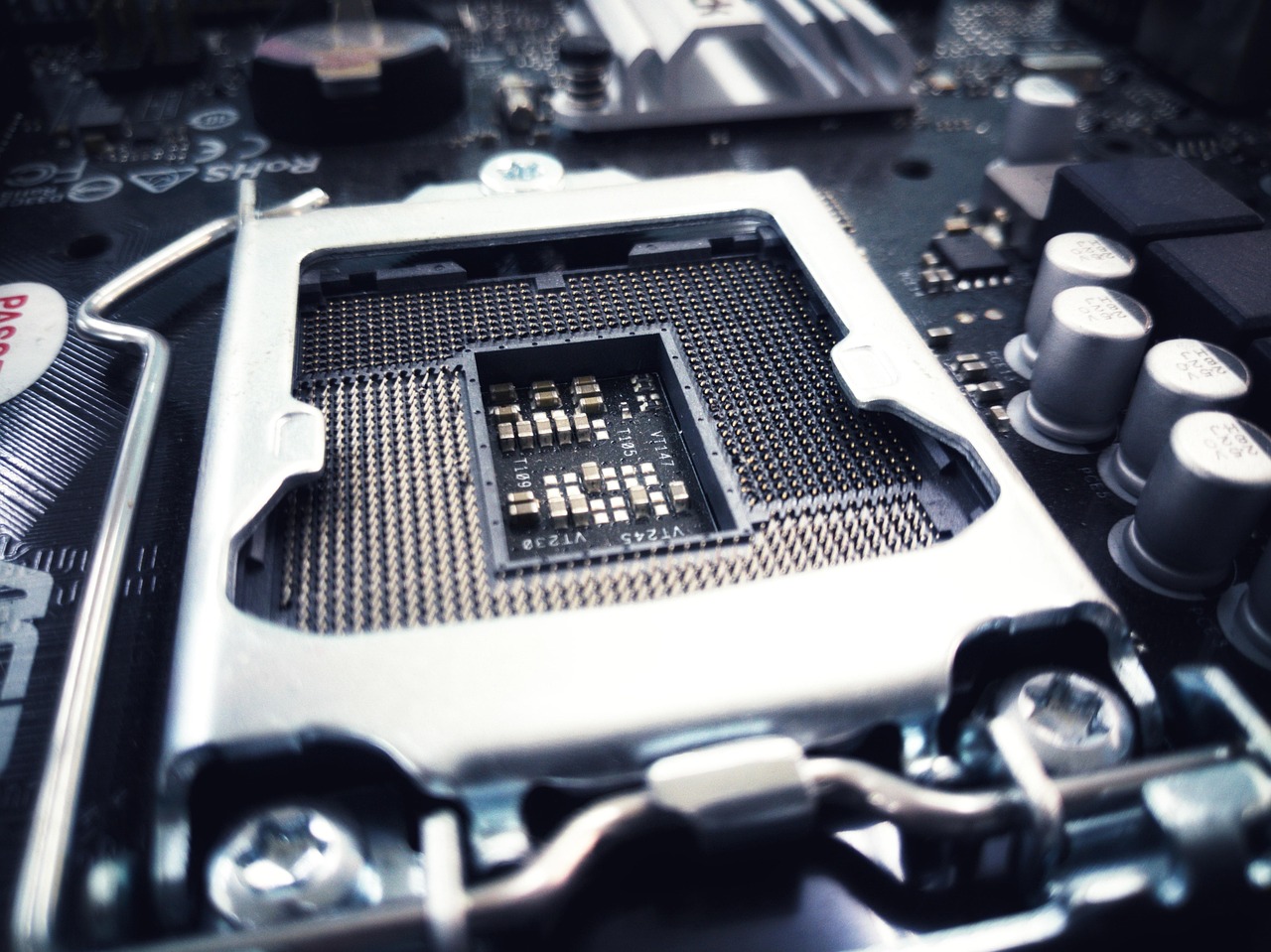
Um exemplo prático é a tarefa de inserir uma GPU em um slot PCIe. O agente de IA começa gerando simulações virtuais para testar diferentes ângulos de aproximação e forças aplicadas. Quando os resultados simulados atingem um limiar de sucesso, o robô executa a tarefa no mundo real, com supervisão dos sensores. Se a GPU não se encaixa corretamente, o sistema registra os dados de falha e ajusta os parâmetros para a próxima tentativa. Esse ciclo de simulação, execução e adaptação reduz significativamente o tempo necessário para treinar um robô em comparação com métodos tradicionais, nos quais engenheiros humanos precisam ajustar manualmente cada variável.
Do laboratório para a fábrica: o que muda na indústria
A automação industrial já utiliza braços robóticos há décadas, mas geralmente depende de programação rígida e ambientes altamente controlados. O ENPIRE introduz flexibilidade ao permitir que robôs aprendam novas tarefas sem reescrever código manualmente. Isso é especialmente relevante em setores como manufatura eletrônica, onde componentes variam constantemente e a adaptação rápida é crucial. Por exemplo, uma linha de produção que atualmente precisa parar para reprogramar robôs quando um novo modelo de placa-mãe é lançado poderia, no futuro, contar com agentes de IA que treinam os robôs automaticamente durante a noite.
Outra aplicação promissora está na logística e montagem de servidores. Empresas como as que fabricam data centers poderiam usar o ENPIRE para treinar robôs a instalar GPUs em racks, conectar cabos ou até mesmo organizar componentes em gabinetes. A capacidade de cortar abraçadeiras plásticas de forma consistente também é valiosa em ambientes onde a organização de fios e cabos é crítica. Ao eliminar a necessidade de intervenção humana em tarefas repetitivas e delicadas, as empresas podem reduzir custos operacionais e aumentar a precisão, minimizando erros que levam a retrabalho ou danos a equipamentos.
O papel da simulação no treinamento autônomo
Um dos desafios no treinamento de robôs é a transferência do aprendizado do ambiente simulado para o mundo real, fenômeno conhecido como “reality gap”. O ENPIRE aborda esse problema integrando simulações de alta fidelidade com testes físicos. Os agentes de IA utilizam ambientes virtuais para explorar uma ampla gama de cenários — desde variações na posição da GPU até diferentes níveis de rigidez das abraçadeiras — antes de executar a tarefa no robô físico. Isso não apenas acelera o treinamento, mas também reduz o desgaste dos equipamentos, já que falhas críticas são identificadas primeiramente na simulação.
A integração entre simulação e realidade é facilitada por motores gráficos avançados e bibliotecas de física que replicam com precisão as condições do laboratório. Os pesquisadores destacam que, quanto mais realista for a simulação, menor será a necessidade de ajustes posteriores no mundo físico. Além disso, o uso de simulações permite que os agentes de IA testem estratégias que seriam perigosas ou inviáveis em um ambiente real, como aplicar forças excessivas em componentes frágeis.
Autonomia noturna: o laboratório que não dorme
O anúncio do Nvidia GEAR menciona que parte do laboratório agora opera de forma autônoma durante a noite, gerando relatórios matinais com os resultados dos experimentos. Essa capacidade de automação contínua representa um marco para a robótica, pois demonstra que sistemas podem operar independentemente por longos períodos sem supervisão humana. Segundo Jim Fan, a ideia é que, no futuro, laboratórios inteiros possam funcionar de forma autônoma, com agentes de IA projetando e executando experimentos enquanto os pesquisadores estão offline.
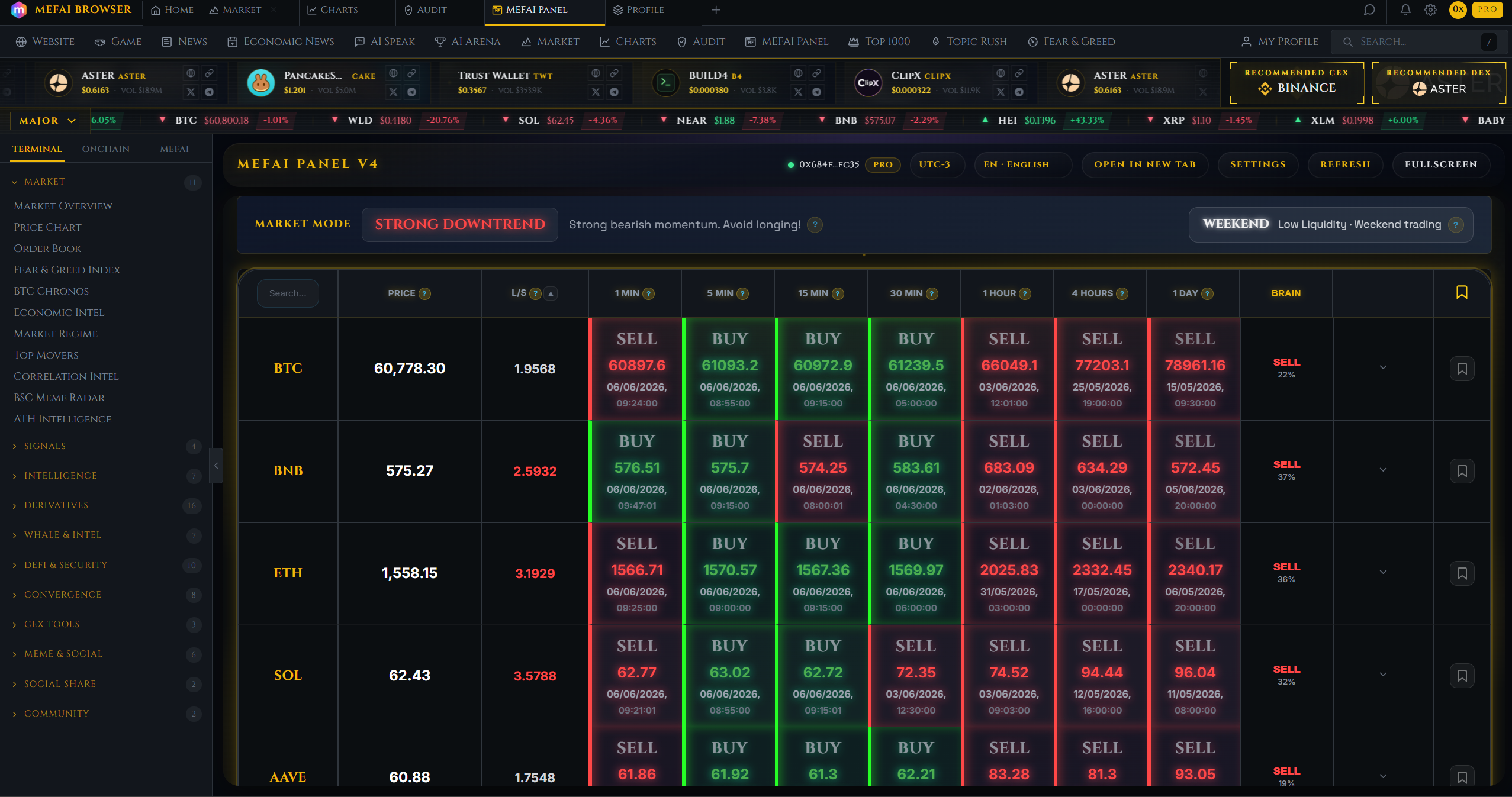




Resultados reais da IA da MEFAI. Ganhe $50 de desconto no plano Pro.
Patrocinado · Desempenho passado não indica resultados futuros. Não é conselho financeiro.
A implicação prática é a aceleração da descoberta científica e do desenvolvimento tecnológico. Em vez de esperar por intervenções humanas para ajustar parâmetros ou corrigir falhas, os robôs treinados pelo ENPIRE podem iterar rapidamente, identificando soluções que talvez não fossem óbvias para engenheiros humanos. Fan brincou que, com essa tecnologia, até mesmo Jensen Huang, CEO da Nvidia, poderia tirar férias sem que o laboratório parasse de funcionar. Embora seja uma piada, ela ilustra o potencial transformador da autonomia robótica em larga escala.
Open-source e o futuro da robótica acessível
Um dos aspectos mais relevantes do projeto é a intenção de disponibilizar o ENPIRE como código aberto. Isso significa que pesquisadores, pequenas empresas e até entusiastas poderão replicar o experimento em seus próprios laboratórios, adaptando o arcabouço para suas necessidades específicas. A decisão de open-source reflete uma tendência crescente na robótica, onde ferramentas avançadas deixam de ser exclusividade de grandes corporações e universidades para se tornarem acessíveis a um público mais amplo.
Para quem deseja implementar o ENPIRE, os requisitos incluem um conjunto de braços robóticos, uma estação de trabalho com GPUs para processamento paralelo e uma infraestrutura de simulação. Embora o custo inicial possa ser significativo, a longo prazo, a automação de tarefas de treinamento pode reduzir a dependência de mão de obra especializada e acelerar ciclos de desenvolvimento. Além disso, a comunidade open-source pode contribuir para aprimorar o arcaboução, adicionando novos módulos ou integrando-o a outras plataformas de robótica.
Desafios e limitações do treinamento autônomo
Apesar do avanço, o ENPIRE enfrenta desafios significativos. Um deles é a escalabilidade: quanto mais complexa a tarefa, maior a quantidade de simulações e iterações necessárias, o que pode sobrecarregar os recursos computacionais. Além disso, nem todas as habilidades robóticas são facilmente transferíveis do virtual para o real. Tarefas que dependem de percepção sensorial avançada, como identificar defeitos em componentes ou lidar com objetos deformáveis, ainda exigem supervisão humana ou algoritmos especializados.
Outro ponto de atenção é a segurança. Robôs treinados de forma autônoma podem executar ações inesperadas ou perigosas se os agentes de IA não forem devidamente limitados por restrições de segurança. Por exemplo, um robô treinado para cortar abraçadeiras poderia aplicar força excessiva em um cabo delicado, causando danos. Os pesquisadores do Nvidia GEAR destacam que o ENPIRE inclui mecanismos de feedback em tempo real para interromper operações perigosas, mas a implementação robusta dessas salvaguardas ainda é um campo em aberto.
O que observar nos próximos meses
O lançamento do ENPIRE e os resultados obtidos pelo Nvidia GEAR abrem várias frentes para acompanhamento. Primeiro, é importante observar como a comunidade open-source irá adotar e aprimorar a plataforma. Se o arcabouço ganhar tração, poderemos ver implementações em laboratórios acadêmicos e startups, acelerando a inovação em robótica. Segundo, a integração do ENPIRE com outras tecnologias, como sistemas de visão computacional avançada ou robôs móveis, pode ampliar ainda mais suas capacidades.
Outro ponto crítico é a evolução dos ambientes de simulação. À medida que motores gráficos e físicos se tornam mais realistas, a lacuna entre simulação e realidade deve diminuir, permitindo que robôs aprendam tarefas cada vez mais complexas de forma autônoma. Por fim, a reação da indústria será determinante: se empresas de manufatura e logística demonstrarem interesse em adotar o ENPIRE, poderemos testemunhar um salto na automação de tarefas delicadas e repetitivas, redefinindo padrões de eficiência e precisão.
Conclusão
O projeto do Nvidia GEAR com o ENPIRE representa um avanço significativo na forma como robôs são treinados, transferindo parte do trabalho de engenheiros humanos para agentes de IA. Ao permitir que robôs aprendam tarefas como instalar GPUs e cortar abraçadeiras de forma autônoma, a tecnologia não só acelera a automação industrial, mas também democratiza o acesso a ferramentas avançadas de robótica. Embora desafios como escalabilidade, segurança e transferência de simulação para realidade ainda precisem ser superados, o potencial de transformar laboratórios em ambientes que operam 24 horas por dia sem intervenção humana é promissor.
Para profissionais da indústria, pesquisadores e entusiastas, o ENPIRE oferece uma janela para o futuro da robótica autônoma. À medida que o código-fonte se torna público e a comunidade contribui para seu desenvolvimento, é provável que vejamos aplicações cada vez mais sofisticadas em ambientes reais. O próximo passo será observar como essa tecnologia se integra a outros sistemas e se adapta a demandas mais complexas, pavimentando o caminho para robôs que não apenas executam tarefas, mas também aprendem e se aprimoram continuamente.
Mais em Hardware & Gadgets

Intel acelera expansão global de fábricas: o que muda para chips, empregos e concorrência
Intel avança com megafábricas nos EUA e Europa até 2027, com foco em nós avançados e parcerias governamentais para reduzir dependência asiática.

Robôs que se treinam sozinhos: como a Nvidia usa agentes de IA para programar robôs sem supervisão humana
A Nvidia, em parceria com universidades, criou um sistema que permite que agentes de IA programem e treinem robôs em tarefas complexas sem intervenção humana, alcançando 99% de sucesso em testes.

Drone e franco-atiradores: como o FBI desmantelou uma trama de ataque durante evento da UFC na Casa Branca
O FBI anunciou a prisão de cinco homens que planejavam usar drones com explosivos e franco-atiradores durante evento da UFC na Casa Branca, com alvos políticos e figuras do setor de criptomoedas.